The first step was to
determine the UAS. The UAS has four main
components, including the Ground Control Station (GCS), airframe, power plant,
power, and payload. Both a fixed wing aircraft and Octorotor were
evaluated. While working from the virtual
GCS, I was able to determine the following information.
|
Airframe |
Power
Plant |
Power |
Payload |
GCS |
Ranking: |
|
Condor
Octorotor |
X8
Black Electric |
ERA
Powerhouse 10000 |
LIDAR,
Synthetic Aperture RADAR, IMU GPS, Compass, Camera |
Large
Dipole, GCS
Trailer |
3 |
|
Feedback: The Condor Octorotor Test 1 used autopilot
file Flight Path 1 to allow the operator to focus on camera angles instead of
flying. The pattern was flown between
10 m/s and 5 m/s with altitude varying from 100 m to 10 m. This allowed for a thorough investigation
and filming of the sight. The LIDAR was
found to not be useful during this portion and only the camera and Synthetic Aperture
RADAR could be used to investigate the crash. |
|||||
|
Condor
Octorotor |
X8
Black Electric |
ERA
Powerhouse 10000 |
Infrared
Sensor with Gimbal, Synthetic Aperture RADAR, IMU GPS, Compass, Camera |
Large
Dipole, GCS
Trailer |
2 |
|
Feedback:
The Condor Octorotor Test 2 used autopilot file Flight Path 1 to allow the operator
to focus on camera angles and FLIR footage.
The pattern was flown between 10 m/s and 5 m/s with the last 2
waypoints slowing to 1 m/s with altitude varying from 100 m to 10 m. The FLIR and camera footage was superior to
the imager received through LIDAR. The
ability to hover for a longer duration or return to a previous angle would
increase the likelihood of mission success. |
|||||
|
Condor
Octorotor |
X8
Black Electric |
ERA
Powerhouse 10000 |
Infrared
Sensor with Gimbal, Synthetic Aperture RADAR, IMU GPS, Compass, Camera |
Large
Dipole, GCS Trailer |
1 |
|
Feedback: The Condor Octorotor Test 3 did not use
autopilot. The operator had to focus
on both the camera and the FLIR footage at the same time. The ERA Powerhouse 10000 provided a long duration
of flight and the pilot was able to switch between FLIR, camera, and
controlling the direction of the aircraft smoothly. This was appropriate for this mission due
to the small area that the UAS needed to cover. |
|||||
|
Tern
Fixed Wing |
2
Stroke Gas Engine |
ERA
Powerhouse 10000 |
Auto
control, EO with Gimbal, Synthetic Aperture, Camera |
Large
Dipole, GCS Trailer |
4 |
|
Feedback:
The Tern Fixed Wing Test 1 did use autopilot.
It was difficult to fly a tight enough pattern to see all aspects of
the crash site. The ERA Powerhouse
10000 provided enough battery life to keep the fixed wing aircraft in the
air. The Tern allowed for more sensors,
but lacked the ability to slow down enough to really examine the site. |
|||||
From
a human factor’s standpoint, the most difficult decision was whether or not the
aircraft needed to be maneuvered manually or in autopilot. With the Tern aircraft, autopilot was
necessary. It was too difficult to
change the camera angle and fly a close enough pattern to the crash site. For the Octorotor, I was able to maneuver the
camera in both manual and autopilot modes.
Working through multiple simulations, I determined the best way to maneuver
the aircraft was manually. This allowed for
the UAS to be hovered in different locations around the plane crash. Without the proficiency of the control station,
it worked better to adjust the camera angle for pictures during hover portions
of flight.

Octorotor Test 3 was the most successful UAS. It had a long battery life and appropriate sensors. The IR sensor, Synthetic Aperture RADAR, and camera provided valuable feedback of the crash scene. This lightweight UAS was able to stay in the air for enough time to successfully take photos from multiple angles of the scene. This was a mission success.
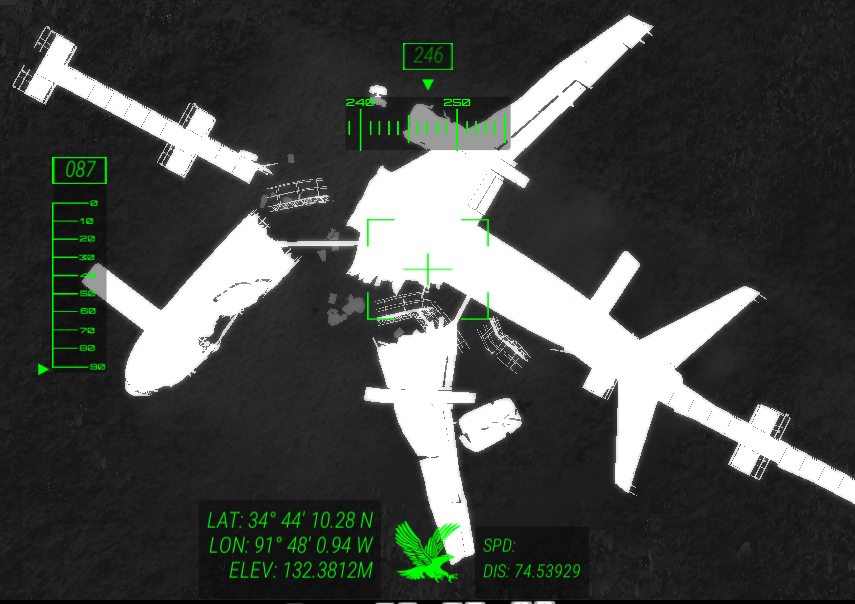
Figure 2: FLIR Imagery of Plane Crash Scene
Being able to test many
different variations of UAS in a virtual lab provided valuable insight into the
best way to handle a crash scene investigation.
Modeling in the virtual world provides valuable information at a low-cost
point to the operators training to fly the missions.
Comments
Post a Comment